Hexapod – wir lernen laufen
Die Hausspinne hat inzwischen Fortschritte gemacht, genug um den neuen Stand in einem Text zu beschreiben. Verbesserungen im Steuerprogramm, neue Schnittstellen und ein Gamepad als Eingabegerät machen die weitere Entwicklung einfacher und auch mehr Spaß.
Projekt: Hexapod 12 DOF
Kontakt: Boris Dirnfeldner
Link: – eigenes Projekt –
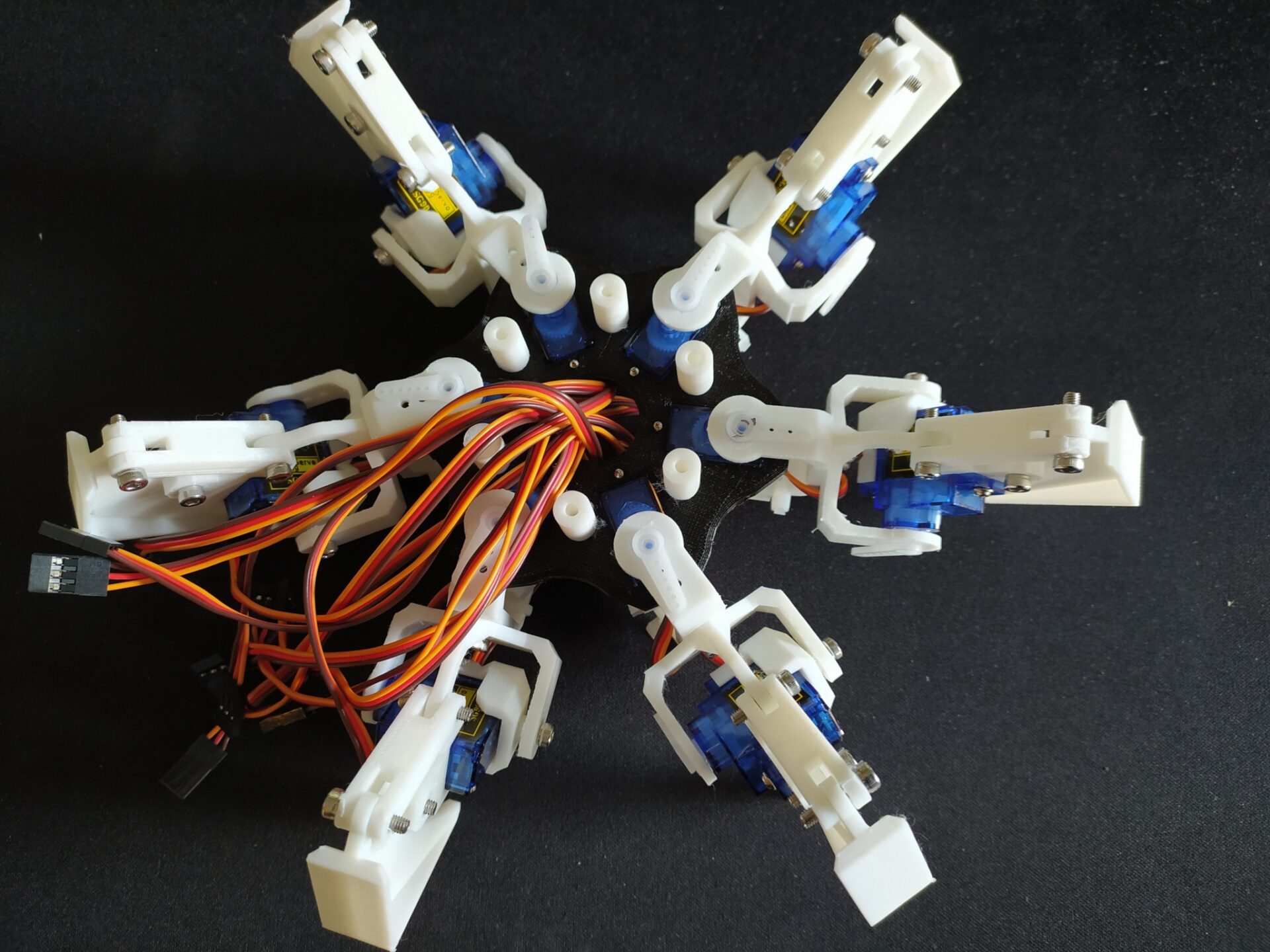
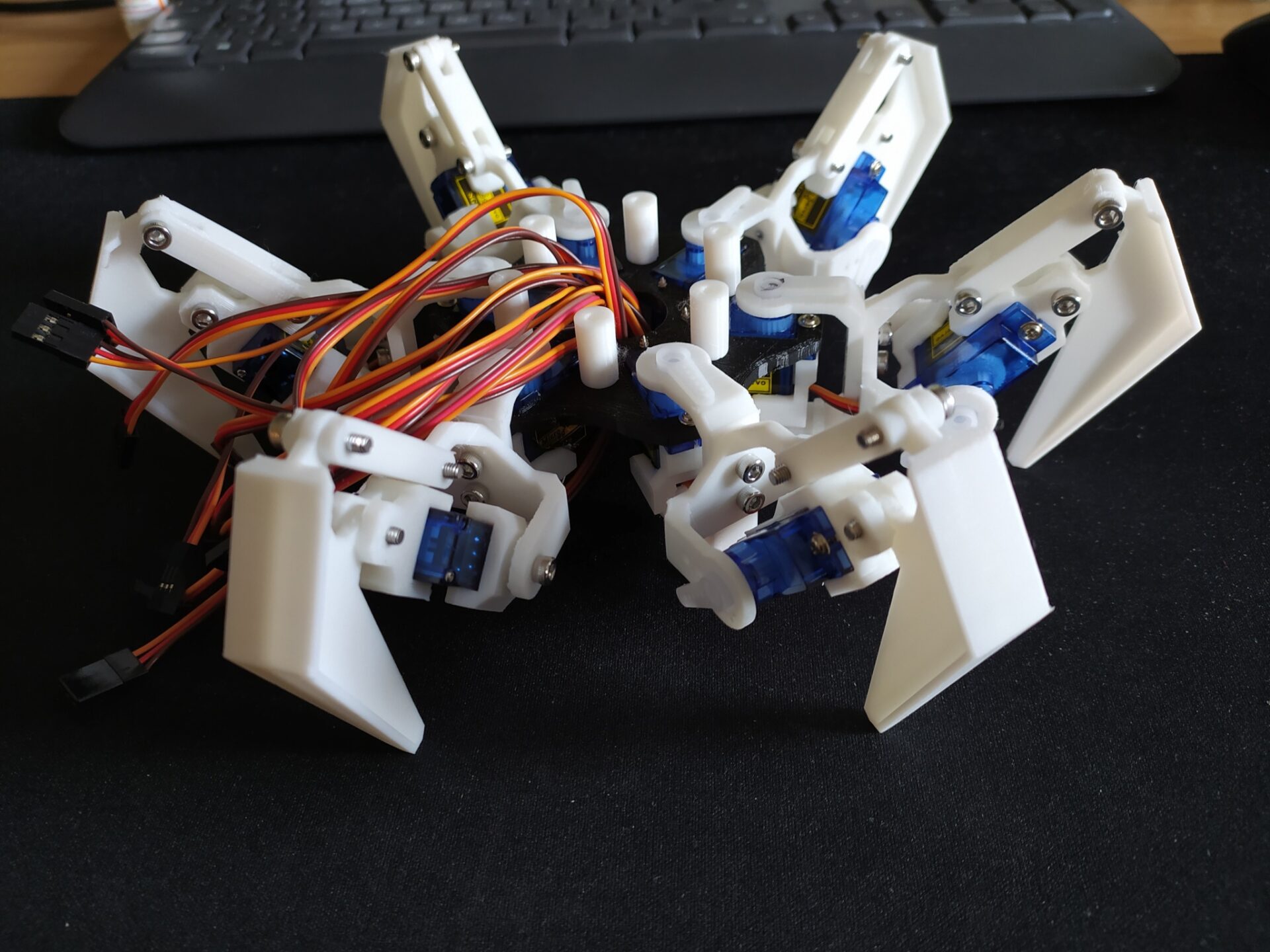
Die Hausspinne basiert ja auf einem fertigen Design (beim Druckmodell) und eigener Software. Nach den ersten Versuchen haben sich schnell auch erste Defizite gezeigt und die Detailprobleme, die das vorhandene Konzept hat.
Änderungen und Verbesserungen Mechanik/Elektronik:
Das Thema Schüttellähmung hat sich mit besser angezogenen Schrauben vermindert, wenn auch nicht gelöst. Hier sind wohl bessere Dämpfungslösungen im Design erforderlich oder eine andere Form der Kraftübertragung von den Servos, das ist aber für die „Lernversion“ nicht mehr relevant. Leider hilft das Festschrauben auch nicht beliebig, weil irgendwann die Servos nicht mehr gegen die Reibung ankommen.
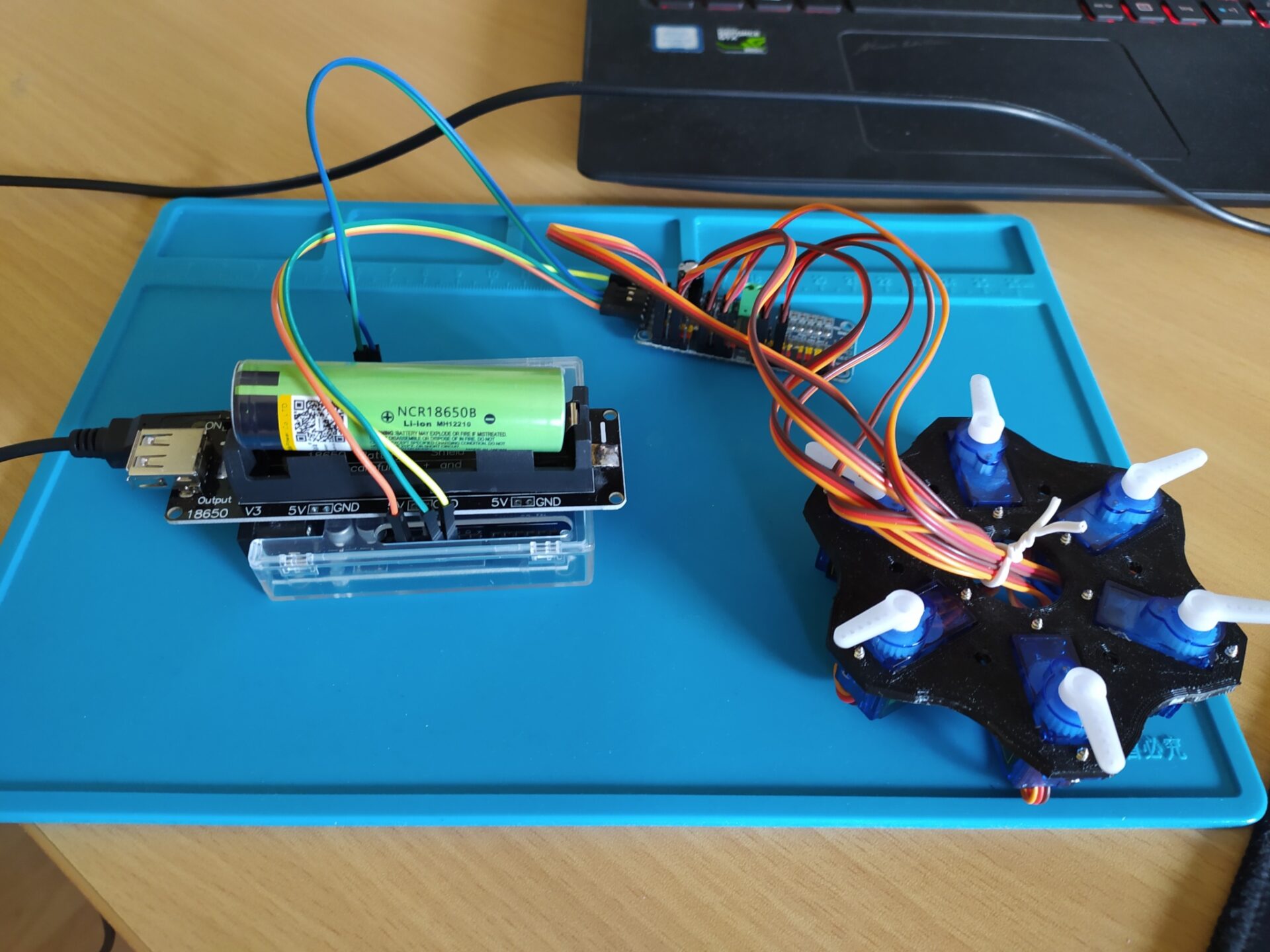
Bei der Stromversorgung hat sich der Ansatz mit dem 18650-Shield nicht bewährt. Der hat einfach nicht genügend Saft um schnelle und komplexe Bewegungen mit ausreichend Strom zu unterstützen und schaltet immer wieder wegen der Überlastung ab. Hier wurde nun auf Modellbau-Komponenten umgestellt, mit einem 3S Lipo, einem Festspannungs-SBEC und entsprechenden Kabeln/Steckern. Damit sollte für das Modell die Stromversorgung geklärt sein.
Den Arduino UNO hatte ich ja bald schon ersetzt durch einen ESP32, der neben deutlich großzügigeren Speicherbedingungen auch mehr Prozessorleistung bietet. Mit jeder Software-Erweiterung sieht man aber den erhöhten Bedarf, so dass der Umstieg ohnehin zeitnah notwendig gewesen wäre.
Neu ist die Anbindung eines PS2-Controllers per Funkdongle. Das Teil hatte ich schon mal in Verwendung, zumindest die Hardware war also wenig problematisch.
Da für die Version damit die Hardware definiert und ausgereizt ist, wird es wohl noch angepasste Druckteile geben um den Ausbau auch sicher zu befestigen.
Software:
Hier wird am meisten gearbeitet und hier gibt es auch am meisten zu tun.
Zum einen werden die Gelenkservos nun mit 50Hz angesteuert und laufen damit weniger hakelig als vorher. Die Steuerung des Gesamtsystems hat nun einen eigenen „Steuerungs-Thread“ und ist damit auch für komplexere Ansteuerung gerüstet. Die Bewegungssequenzen sind nun auch präziser, da nicht mehr jedes Gelenk einzeln angesteuert wird, sondern alle Servos zusammen (und fast zeitgleich) aktualisiert werden. Dadurch wird auch der erforderliche Code für die Bewegungen kürzer und übersichtlicher. Die einzelnen Gelenke laufen auch jeweils in kleinen „Threads“ und interpolieren die geforderte Bewegung in der gewünschten Geschwindigkeit (allerdings bisher noch linear).
Über die Kommandozeile ist es nun auch möglich Kommandos auf Gelenkebene und für das Gesamtsystem direkt per USB-Verbindung einzuspeisen und sich so komfortabler an mögliche Bewegungen ranzutasten. Ohne Try&Error geht da fast nichts, zumal nicht jede Bewegung theoretisch sicher abgeschätzt werden kann.
Auch muss ich so nicht mehr jeden Versuch erst mal als Programm neu übertragen, was auf Dauer auch das Flash ausnudelt.
Da die Kommandozeile auf Dauer auch keine Laune macht, vor allen nicht wenn es um Timing-Fragen geht, ist nun ein PS2-Spielecontroller mit Funkverbindung im System. Eigentlich ein bekannter Kandidat, allerdings nur auf den Arduinos. Mit dem ESP32 gab es einige hakelige Punkte die erst mal (in der Library) angepasst werden musste. Nach ein paar Stunden Fluchen, Suchen, Umstecken und weiteren Fluchen macht das Teil endlich wieder was es soll. Aber so richtig Lustig war das nicht, zumal ich da keine derartigen Probleme erwartet hatte.
Aktuell ist der Fokus der Entwicklung also in den Bewegungen des Systems und den Übergängen zwischen Kommandos. Auch wird alles für ein 18DOF Modell vorbereitet um hier die Anpassungen übersichtlich zu halten. Je mehr ausprobiert wird, desto öfter finden sich auch kleine Bugs die natürlich auch rausgearbeitet werden.
Mit dem Gamepad hat nun auch der Sohnemann den ersten Kontakt mit dem neuen Stubenmitglied und schon (für den geringen Funktionsumfang) viel Spaß. Hier noch ein kurzes Video mit den ersten Versuchen mit Gamepad und Lipo nach Umbau:
Planspiele NextGen:
Mit den Erfahrungen gibt es natürlich auch den Wunsch nach Verbesserung. Am aktuellen Modell wird nicht mehr viel geschraubt, und die fehlenden Freiheitsgrade sind nicht auszugleichen.
Nebenher wird also die neue Generation schon mitentworfen. Folgende Rahmenbedingungen zeichnen sich bereits ab:
- Das Basisdesign orientiert sich an einem Nachbau des bekannten PhantomX AX von Trossen Robotics. Um die Kosten im Rahmen zu halten, wird dort mit MG996R Digitalservos gearbeitet. Scheinbar kraftvoll genug, 18DOF, kugelgelagerten Gelenken, einem geeigneteren rechteckigen Layout und genügend Platz alles drauf zu montieren. Der Grundaufbau mit kleinem Akku sollte mit ca. 200€ Materialkosten möglich sein.
- Die Ansteuerung der Servos wird direkt vom Controller erfolgen anstatt über den bisher verwendeten PCA9685. Zum einen ist der I2C-Bus ein potentieller Flaschenhals bei schneller Ansteuerung aller Servos, zum anderen möchte ich bessere Kontrolle über die Ansteuerung bekommen. Der ESP32 hat hierfür genügend I/Os, sollte also passen.
- Die Stromversorgung wird ähnlich ausgeführt, benötigt aber einen leistungsfähigeren SBEC. Eine Version mit 20A sollte normalerweise genügen und ist bestellt. Der könnte dann auch mit leistungsfähigeren Lipos umgehen, falls notwendig.
- Die Fernsteuerung per PS2-Controller bleibt. Je mehr die Software bietet, desto höher ist der Nutzen einer solchen Steuerung.
- Die Software sollte sich nahtlos umstellen lassen, natürlich mit einigem an Feintuning. Durch die zusätzlichen Freiheitsgrade sollte es aber speziell bei Bewegungen in eine Richtung wesentlich flüssiger und ohne das ausgeprägte Gerutsche laufen.
- Ein Feedback über die Gelenkpositionen wäre wichtig, aber noch ungelöst. Eine Option wäre ein Rückkanal über Potis, dafür fehlen dem ESP aber die benötigten Eingänge. Eine Idee sind hier Analogmultiplexer, aber das muss sich erst noch zeigen.
- Auch wäre es sinnvoll, an den Beinspitzen ein Feedback für Kontakt zu bekommen. Das geht z.B. mit Mikroschaltern oder über Drucksensoren. Auch hier ist es noch nicht klar wohin die Reise geht.
Natürlich gibt es Tonnen an weiteren Ideen und erforderlichen zusätzlichen Arbeiten, aber auch hier ist die Basisplattform erst mal das wichtigste.
Fazit:
Es bleibt also spannend und weiterhin viel zu tun. Es zeigt sich aber, dass es in die richtige Richtung geht und die Ergebnisse werden mit jedem Versuch besser. Das NextGen-Projekt wird aber auch erst 2021 starten und dann vermutlich auch einige Zeit brauchen, zumal ich dann hoffentlich auch wieder in regulären (Brot&Butter-) Projekten zu tun habe.